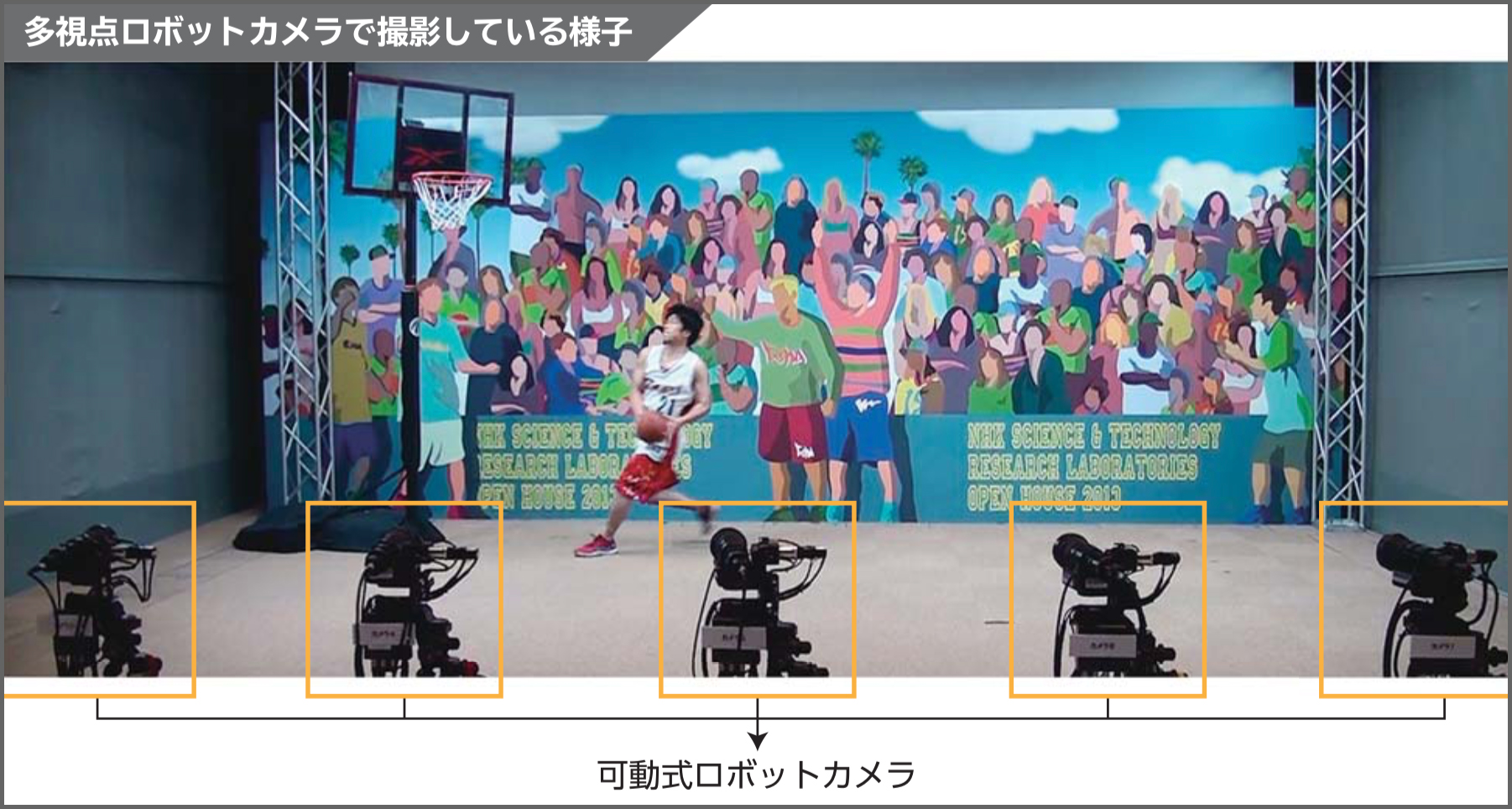
動いている被写体を、複数の可動式ロボットカメラが連動して追随します。得られたカメラ映像を滑らかに切り替えることにより、被写体の多視点映像を表示するシステムです。
利用分野
・スポーツ生中継などの番組制作
・デジタルサイネージなどのコンテンツの制作
・AR(拡張現実感)技術を利用したコンテンツの制作
特長
(1)複数の可動式ロボットカメラが連動して、動く被写体を追随して撮影します。
(2)独自開発の画像補正処理により、滑らかな映像切り替えを実現します。
(3)準リアルタイムで、精度よく多視点映像を生成します。
技術解説
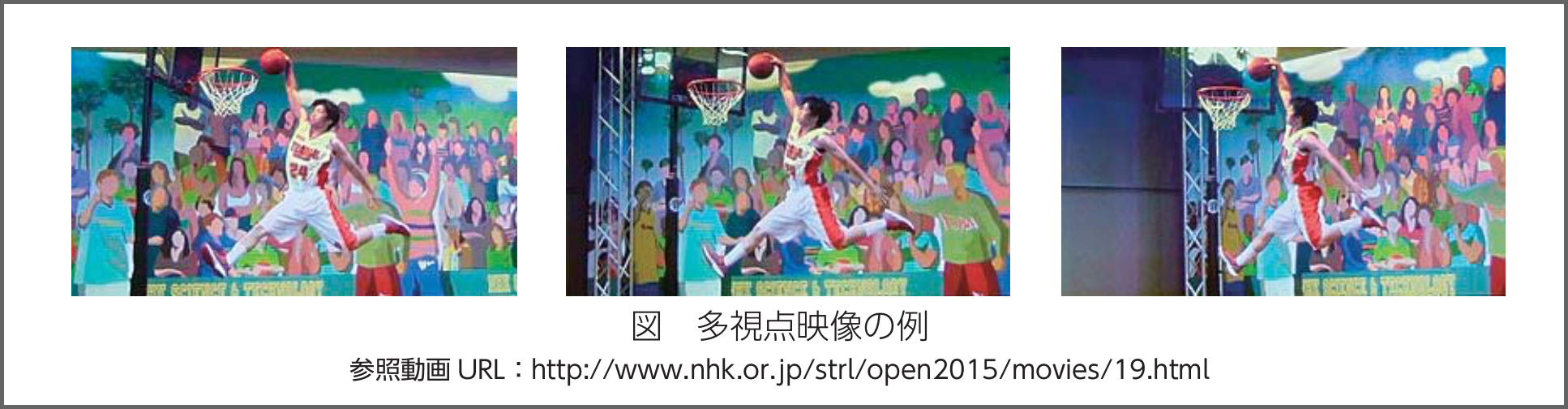
複数のロボットカメラを協調制御することで、動く被写体の周囲を回りこむような映像(多視点映像) を準リアルタイムで生成し、それらを滑らかに切り替えることにより、スポーツなどの決定的な場面での被写体の動きをわかりやすく伝えることを目的として開発しました。放送現場での運用性や即応性を重視した実用的なシステムです。
(1)システム構成
システムは、主に 16 台の可動式ロボットカメラと4台の PC で構成されています。可動式ロボットカメラは、パン・チルト雲台に小型ハイビジョンカメラを搭載したもので、外部同期入力と HD- SDI 信号出力が可能です。カメラの非圧縮映像を PC に搭載されたフレームメモリに同期収録します。収録した映像に画像補正処理を施し、多視点映像を生成します。
(2)可動式ロボットカメラの制御
複数台の可動式ロボットカメラのうちの1台のマスターカメラをカメラマンが操作することで、残りのカメラを自動的に被写体へ一斉に方向制御させます。
(3)画像補正処理
多視点映像を生成する際に、各カメラの光軸が被写体の実在する位置(注視点)で交わっていなかったり、レンズの画角が揃っていなかったりすると、カメラ映像の切り替え時に映像の " がたつき " が生じます。そこで、画像処理によって、このがたつきを補正しています。注視点は、実空間中の点としてオペレーターがカメラ映像上で指定します。指定した注視点が、画面中心となるように射影変換処理を施すことで、各カメラの注視点を一致させます。さらに、各カメラから注視点までの距離の違いによる被写体の像の大きさをそろえます。3秒程度のシーンであれば5秒程度で処理することができます。
提供可能な技術
・複数の可動式ロボットカメラを被写体へ一斉に方向制御するためのプログラム
・複数のカメラの映像切り替えを滑らかにするための画像補正処理技術およびプログラム
・画像補正処理を高速に実行するための計算プログラム
・生中継などで利用するためのシステム構築技術
関連特許
・特許第5509044号 多視点ロボットカメラシステム、多視点ロボットカメラ制御装置及びプログラム
・特許第5988842号 ロボットカメラ制御装置、そのプログラム及び多視点ロボットカメラシステム
・特許第6055223号 射影変換映像生成装置及びそのプログラム、並びに、多視点映像表現装置
・特許第6336856号 多視点映像表現装置及びそのプログラム
(上記のリンクは開放特許DBにリンクしており、NHK財団のWebサイトから離れます)
≪キーワード≫ 多視点映像 / ロボットカメラ / 映像制作
本技術の利用に関するご相談窓口:URL https://www.nhk-fdn.or.jp/es/transfer/contact.html